|
用我的脑波控制一只六角虫
自从我开始使用OpenBCI以来,我一直在寻求用大脑控制一些东西。
当然,不久前,我用脑电波成功地点亮了一个LED,但那很漂亮
易于理解的我想要更多。现在我可以做到了。我可以用我的大脑控制一个机器人!对
炸薯条
查看我的完整个人资料
关于我
► 2015 (4)
▼ 2014 (25)
► 12月(1)
► 11月(2)
► 10月(7)
► 8月(1)
▼ 6月(1)
用我的大脑控制一只六角虫
波浪
► 5月(5)
► 4月(4)
► 1月(4)
► 2013 (20)
博客存档
Adafruit公司
标签
加速度计安卓ASSR Audacity
19更多下一个博客»创建博客登录
在浏览器专业版中打开你是开发人员吗?试用HTML到PDF API pdfcrowd.com
方法:我的机器人只有几个动作可以做…左转,右转,向前走,然后
火为了控制大脑,我需要一种方法,利用大脑发出的信号来调用这些命令
脑理想情况下,我只会想到“火!”机器人会做出反应。不幸的是
各种脑波太难检测。相反,我需要使用易于识别的脑电波
发现对我来说,“简单”脑电波包括当我
闭上眼睛,以及当我看眨眼的电影时产生的脑电波(也称为。
视觉夹带)。所以,我的方法是使用OpenBCI来记录我的脑波,写
用于检测这些特定类型脑波的软件,并向基于机器人的系统发出命令
在其上检测脑电波。
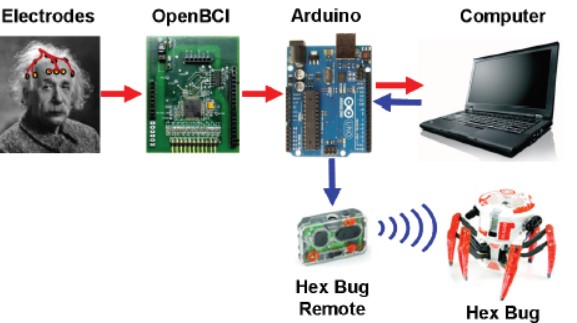
硬件设置:这个黑客的核心硬件类似于我通常的OpenBCI设置:EEG
电极、OpenBCI板、Arduino Uno和我的电脑。添加到该设置中的是十六进制
Bug本身及其遥控器,我对其进行了黑客攻击,使遥控器可以由
阿杜伊诺。如下图所示,我的脑电波信号从我的大脑一直传到电脑
PC处理EEG数据,寻找阿尔法波或视觉夹带波。如果有的话
检测到后,它决定向机器人发出什么命令。命令被传回给
Arduino,然后驱动遥控器,Hex Bug通过其通常的红外链路接收遥控器。
以下是你在视频中看到的所有片段
BCI
检测心电图
电极夹带
频率分析
六角虫Mu波
OpenBCI
Python设置
信号焊接
辅助信号Bluetooth BrainBay
相干浓度
EOG ERPs眼伪影
hackathon黑客帽
阻抗冥想
Neurosky无PC噪音OpenViBE
其他人乌鸦鲨
Sparkfun WAV文件
搜索
搜索此博客
选择语言
由翻译负责
翻译
自制被动语态
电极
在接受挑战之后
自己一些像样的脑电图
电子,第二难
部分是变得体面
脑电图电极。当然,他们。。。
使用
我的脑波
自从我努力
OpenBCI开始了,我一直
希望控制
我的大脑有些问题。
当然,不久前,我成功了我。。。
OpenBCI:测量
电极阻抗
脑电图的重要驱动因素
信号质量如何
电极是
电气连接至
皮常见的临床和研究g。。。
热门帖子www.senba.site
在浏览器专业版中打开你是开发人员吗?试用HTML到PDF API pdfcrowd.com
脑电图设置:我要测量我的阿尔法波,我要测量大脑
通过视觉夹带产生的波浪。根据我以前的经验,我知道两者都是
最好是使用头部背面的电极记录(如果您进入“O1”位置
您的10-20电极放置标准)。我的头上不需要到处都是电极。这就是
我只使用感应电极。就是这样。当然,脑电图也需要参考
电极,我放在我的左耳垂上。最后,脑电图通常有第三个电极(“偏压”或
我把它放在我的右耳垂上。
看看我的脑波频率:如上所述,我的方法是控制我的
机器人通过检测阿尔法波和视觉夹带的脑波。这些很容易
可检测,因为它们发生在特定频率。α出现在10 Hz左右,视觉进入
无论我用什么电影,脑波都会以眨眼的速度出现(我最好的结果是
从5赫兹和7.5赫兹的电影)。所以,为了控制我的机器人,我将在这些位置寻找脑电图信号
频率:5 Hz、7.5 Hz和10 Hz。我将通过写一些来“寻找”这些频率
脑电图处理软件会查看脑电图信号的频率内容,看看这些
存在频率。
以下是各部分如何协同工作的示意图。
用我的
脑电图设置
玩新游戏时
EEG系统(自制或
购买),这很重要
从以下信号开始:
容易获得。通过启动wi。。。
冥想时的脑电图
早在九月份,我
和OpenBCI的人在一起
纽约制造商展览会
炫耀我们的第一次
OpenBCI原型。我是
那里穿着m。。。
在中打开强(信噪比仅为6-7 dB)。图中的其他峰值非常接近相同
大小,这将导致向机器人发送错误命令。在我的电影里
帖子中,有几个错误的命令。
用错误命令平衡灵敏度:为了减少错误命令的数量,我可以
将检测阈值提高到6 dB以上。不幸的是,正如前两个频谱图所示
上面,我的5 Hz和7.5 Hz峰值通常很弱(<7 dB)。因此,任何试图
将检测阈值提高到6 dB以上将导致我无法再检测到合法的大脑
波浪。我知道,因为这正是我尝试过的调整过程。真倒霉如果我想要更多
可靠的性能,我需要开发一个比这个简单的FFTthreshold更奇特的信号处理
方法未来的挑战!
总结:即使在我的电影中看到了错误的命令,我仍然能够命令
机器人在桌子周围移动。我可以把它(大致)放到我想要的地方。我做到了
只有我的脑电波。我觉得这很令人兴奋!耶!接下来的步骤是什么?
好吧,也许现在我有了这个,我可以继续控制飞鱼,或者
四旋翼机!对于我可以用大脑控制的事情,你还有其他很酷的想法吗?
酷:这一黑客行为是IEEE Spectrum在OpenBCI上的一篇文章中发现的。凉的
看看这里。
更酷的是:这个黑客也被Wired发现了。享乐
接下来:我与OpenBCI的Joel和Conor分享了这篇黑客文章。你可以看到他们的运气
在这里控制机器人。
跟进:跟进:我们使用了类似的方法让一个5人团队来控制大脑
游泳的鲨鱼气球。很酷。看看这里。
将其编程为发出“Forw ard”命令。信噪比>8 dB。
+19在谷歌上推荐
在浏览器专业版中打开你是开发人员吗?试用HTML到PDF API pdfcrowd.com
标签:BCI、检测、夹带、十六进制错误
答复
32条评论:
taro 2014年6月9日上午11:09
你好,Chip,
这是一个很棒的演示。你正在到达那里。我对你的工作感到惊讶
草图供其他人使用。我可能会用Matlab试试你的方法,看看结果如何。
另外,降低检测阈值并添加确认方法(反馈)如何
在发出命令之前发送到系统?例如,系统将要求使用双眼
在发出命令之前,在一定的时间间隔内闪烁。它将不是一个纯粹的脑电图系统
虽然
回复
Chip 2014年6月9日上午11:50
嘿,谢谢你的阅读!感谢您的反馈!
关于使用确认方法,我认为这是一个好主意。不幸地
我将检测阈值降低到6 dB以下的经验是
许多检测结果表明,您必须不断确认/拒绝候选操作。
那太痛苦了。
最好的方法是提高所需信号的信噪比
检测……在这种情况下,它是我视觉上夹带的脑波的SNR(5
Hz和7.5 Hz),需要加强。人们总是可以提高信噪比
通过额外的平均,但这会减慢响应时间。其他想法
我的经历包括:
*更亮的闪烁灯
*闪烁的灯光具有更高的明暗对比度
*闪烁的灯光靠近我的眼睛,如眼镜
或者,可以通过使用多个脑电图电极来提高信噪比。如果我
在我的后脑勺上使用了多个电极(比如O1和O2),可能是
视觉上夹带的信号在两个电极之间是相干的,而
“噪音”(背景活动)可能不连贯。如果我利用连贯性
可能会得到另一个或两个dB(两个电极的最佳情况是SNR为+3 dB)。
因此,这些是我对提高命令可靠性的想法。
在浏览器专业版中打开你是开发人员吗?试用HTML到PDF API pdfcrowd.com
回复
答复
继续给我你的想法!
Chip 2014年6月10日晚上9:24
我刚刚读了一篇关于稳态视觉诱发电位(SSVEP)的IEEE论文,就像我
在这里看我的闪光电影。正如我在上面的评论中提到的,
他们认为多个脑电图电极可以提高性能。
在我上面的建议中,我说我可以在以下情况下寻求使用其他渠道:
SSVEP信号可能在通道之间是相干的(即,公共的)。通过添加
这些通道结合在一起,我可以提高SSVEP信号的幅度,这将
提高其信噪比,使其检测更可靠。
相反,在IEEE的论文中,他们建议使用SSVEP
信号并不常见,但背景脑电图活动(即“噪声”)可能
成为普通人。他们建议将O1与PO1配对,将Oz与POz配对,或将O2与PO2配对
通过对这些对进行差分,可以降低噪声幅值,这将是一个
同样有效的方法来实现我的目标,提高信噪比。
好主意!
未知2016年1月12日上午6:20
你的报纸是什么 |